Litter-Robot 4: 레이저 센서 청소 방법
Litter-Robot 4는 OmniSense™ 감지 기술이 탑재되어 있어 레이저 및 무게 센서를 통해 고양이 출입 여부와 쓰레기통/모래의 상태를 실시간으로 감지합니다. OmniSense™는 고양이의 안전을 위한 SafeCat 시스템도 지원하며, 총 4개의 안전 구역을 지속적으로 감시합니다.
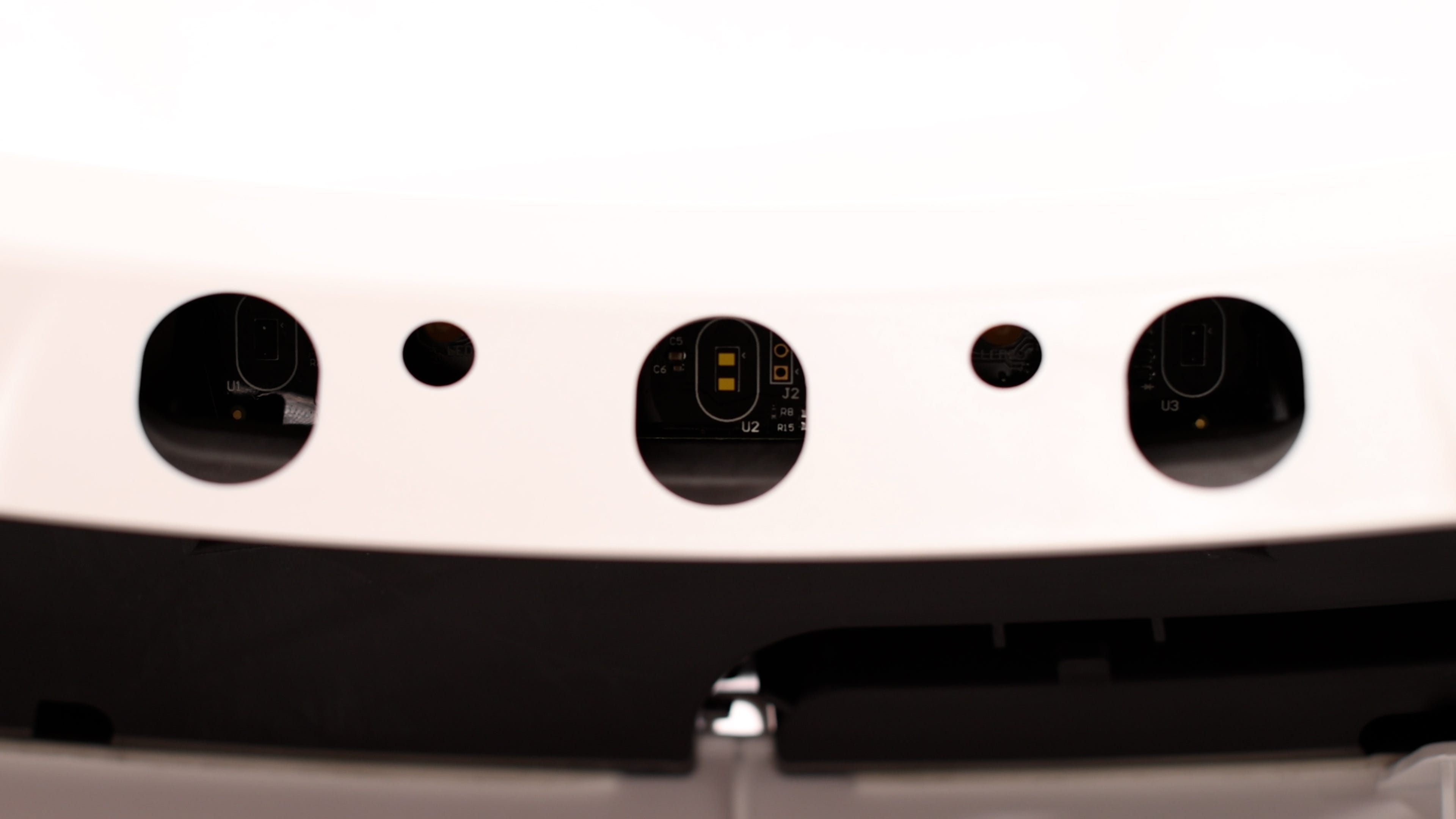
센서는 베젤 상단에 3개, 본체 하단에는 고양이 감지용 무게 센서가 포함되어 있으며, 고양이의 출입을 감지합니다.

이제 베젤에 위치한 3개의 커튼 센서에 대해 자세히 알아보겠습니다.
- 센서가 있는 베젤 부위를 마른 천으로 닦아 먼지나 털 등을 제거하세요.
-
베젤 내부 가장자리를 브러시가 달린 청소기로 청소하세요. 특히 베젤
상단의 구멍(커튼 센서 위치)을 지나가며 청소하세요.
-
테스트 사이클을 실행해봅시다. Reset 버튼을 짧게
누른 다음, Cycle 버튼을 짧게 눌러 청소 사이클을
실행하세요.

Litter-Robot가 사이클을 완료한 후에는 Home 위치로 돌아가며 파란색 고정 불빛이 표시되어야 합니다.
문제가 해결되지 않았나요?
사이클 중 센서 작동을 방해할 수 있는 이물질이나 이물체가 있는지 다시 한 번 확인해 주세요.
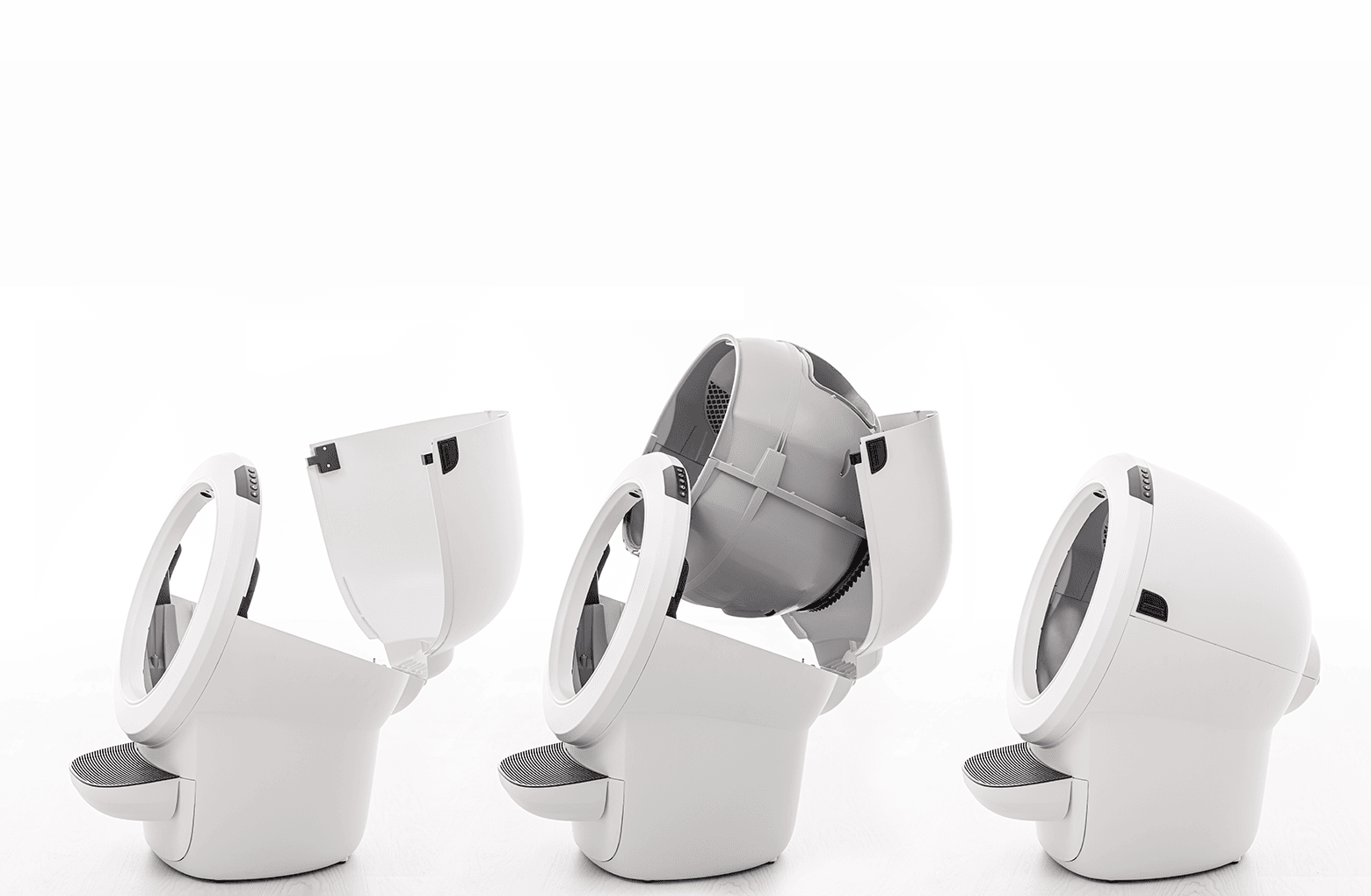
먼저 본체의 보닛과 글로브를 분리하여 문제 여부를 확인하겠습니다.

보닛 분리하기
-
보닛을 열기 위해 양쪽의 버튼(잠금장치)을 눌러 보닛을 들어올리고 뒤로
회전하여 오픈 위치로 이동시킵니다.

- 보닛을 안전한 곳에 따로 보관해 주세요.
-
펜스가 설치되어 있는 경우, 베젤에서 펜스를 분리합니다.

글로브 분리하기
-
글로브를 분리하려면, 글로브 상단에 있는 검정색 손잡이를 잡고
글로브를 베이스에서 들어 올려 옆에 두세요.
![]()
-
폐기물 서랍을 꺼내 비우거나 옆에 두세요.
![]()


실링 스트립(Seal Strips) 점검
고양이 털이 글로브 하단 앞부분에 위치한 실링 스트립에 끼일 수 있습니다. 글로브가 회전할 때, 이 털이 커튼 센서 작동을 방해할 수 있습니다.

글로브 내부의 실링 스트립이 들뜨거나 이물질이 붙어 있지 않은지 확인해 주세요.
센서 청소
글로브, 보닛, 폐기물 서랍을 제거한 상태에서 유닛을 뒤로 살짝 기울이면 베젤의 구멍을 통해 각 센서를 확인할 수 있습니다.
깨끗하고 마른 면봉을 사용하여 센서 표면을 조심스럽게 닦아 먼지를 제거해
주세요.

센서 표면의 먼지는 눈에 잘 보이지 않으므로, 가볍게 닦는 것만으로도 작동에 영향을 줄 수 있는 이물질을 제거하는 데 도움이 됩니다.
이제 모든 장애물이 없는지 확인했으므로, 폐기물 서랍, 글로브, 보닛을 다시
설치하고 유닛이 정상 작동하는지 확인해 봅시다.
글로브 설치하기
-
글로브를 설치하려면, 글로브 상단의 검정색 손잡이를 잡고 베이스에
맞춰 놓습니다.
![]()
- 글로브를 설치할 때, 글로브 손잡이와 폐기물 포트가 위쪽을 향하도록 하여 글로브가 Home 위치에 가깝도록 합니다.
-
글로브 뒤쪽의 큰 검정색 기어가 베이스에 있는 작은 흰색 구동 기어와
쉽게 맞물려야 합니다.
![]()


보닛 설치하기
-
보닛이 완전히 분리되어 있었다면, 보닛을 위쪽으로 회전시킨 후 베이스
뒤쪽의 힌지 구조에 맞춰 정렬합니다.
![]()
- 보닛을 닫으려면, 글로브 위로 보닛을 아래로 회전시키며 양쪽의 걸쇠를 안쪽으로 살짝 눌러 베이스에 맞춰 정렬합니다. 걸쇠가 딸깍 소리를 내며 고정되어야 합니다.
-
보닛 상단 중앙 탭이 제자리에 고정되었는지 확인하려면, 탭 위치를 눌러
보닛이 포켓에 정확히 들어갔는지 점검하세요.
![]()


마지막 단계
-
펜스를 글로브 입구 베젤에 딸깍 소리가 나도록 끼워 다시
설치합니다.
![]()
-
전원을 연결하고 기기를 켭니다.
![]()
- Litter-Robot가 파란색 고정 불빛을 표시하며 사용 준비가 완료되었음을 나타냅니다.
